FieldNAV
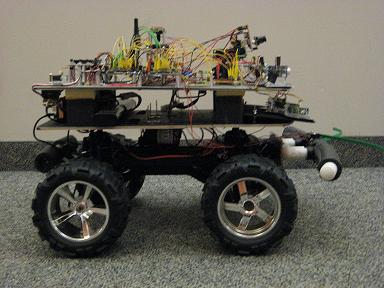
Autonomous Mobile Robot
Key Points
Individual research project since mid 2007;
currently undergrad senior capstone project
Robotics, computer vision, proportional control, path planning,
collision avoidance, sensor fusion, parallel programming, interchip communication
Embedded Systems Model
Application software layer: navigation tasks
System software layer: low-level drivers, communication protocols
Hardware layer: circuits, transducers, mobile base, MCUs
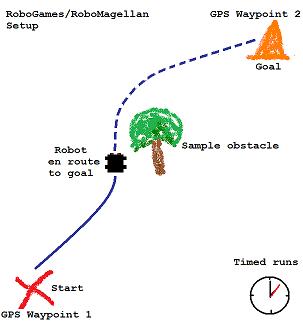
System Purpose
All content © 2009 DigiPen (USA) Corporation, all rights reserved.